



Azionamento passo-passo a ciclo chiuso bifase con controllo a impulsi T60Plus


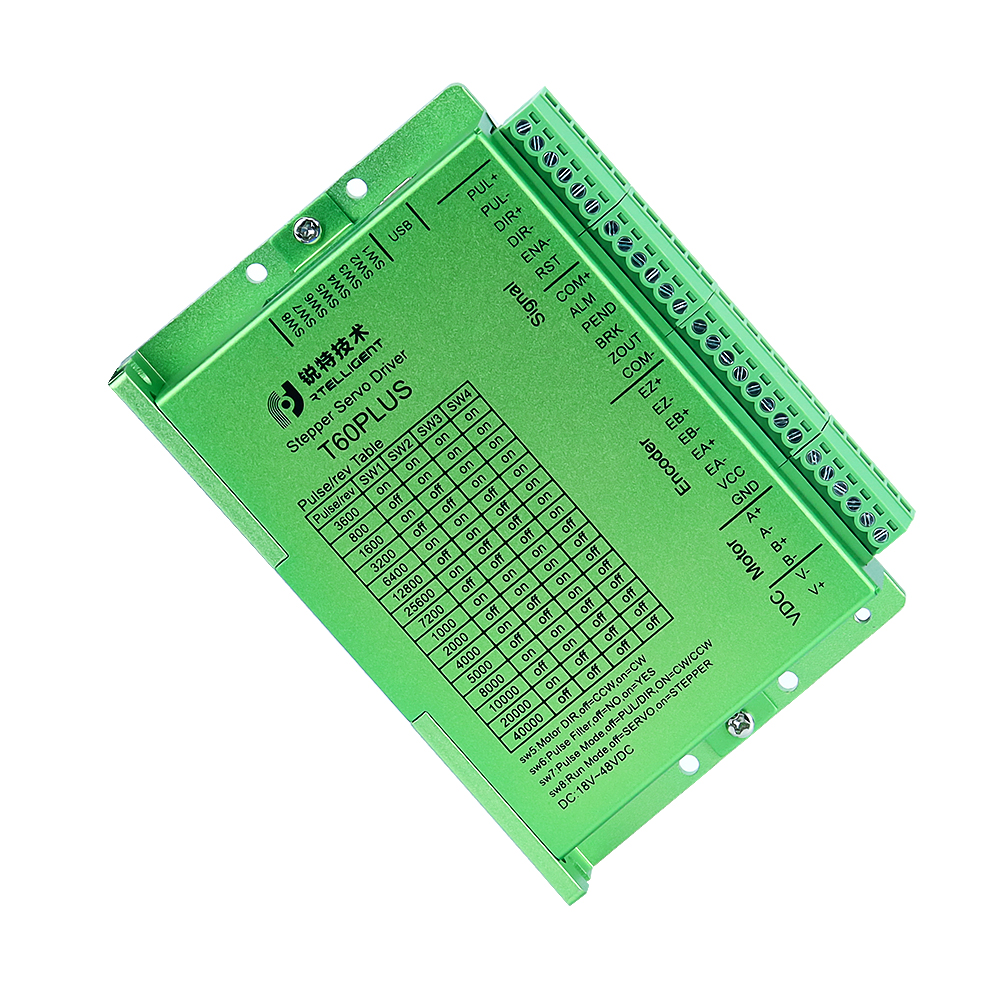
Introduzione al prodotto



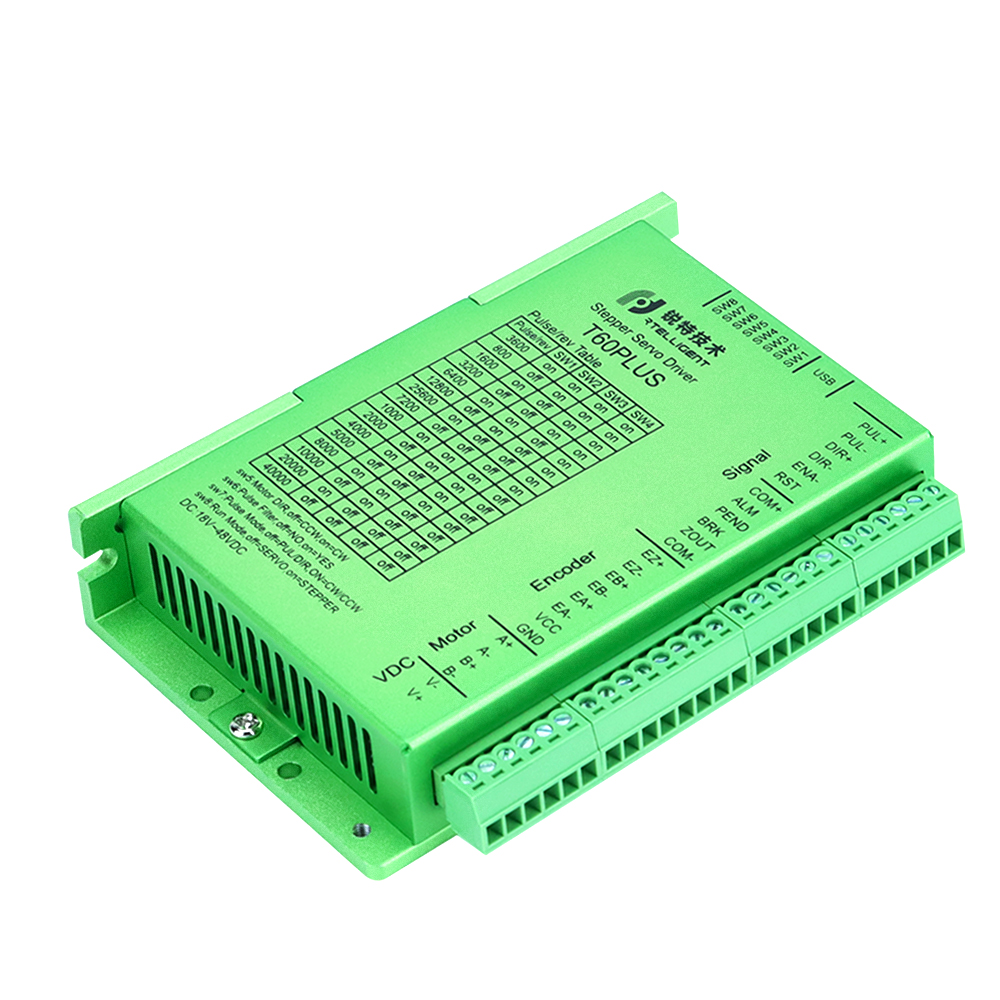
Connessione

Caratteristiche
| Alimentazione elettrica | 18~48 V CC |
| Precisione del controllo | 4000 impulsi/giro |
| Modalità a impulsi | Direzione e impulso, doppio impulso CW/CCW, impulso in quadratura A/B |
| Controllo attuale | Algoritmo di controllo vettoriale del servo |
| Impostazione della suddivisione | Impostazione dell'interruttore DIP, 15 opzioni (o impostazione del software di debug) |
| Gamma di velocità | Convenzionale 1200~1500 giri/min, fino a 4000 giri/min |
| Soppressione della risonanza | Calcolo automatico del punto di risonanza per sopprimere le vibrazioni a media frequenza |
| Regolazione dei parametri PID | Software di debug per regolare le caratteristiche PID del motore |
| Filtro a impulsi | Filtro del segnale digitale da 2 MHz |
| Uscita allarme | Uscita di allarme per sovracorrente, sovratensione, errore di posizione, ecc. |
Modalità a impulsi
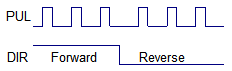
L'interfaccia del segnale dell'azionamento standard della serie T è a impulsi e il T60PLUS V3.0 può ricevere tre tipi di segnali di comando a impulsi.
| Impulso e direzione (PUL + DIR) |
|
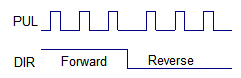
| Doppio impulso (CW + CCW) |
|
| Impulso ortogonale (impulso ortogonale A/B) | 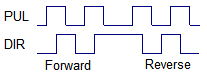 |
Impostazione micro-stepping
| Impulso/giro | SW1 | SW2 | SW3 | SW4 | Osservazioni |
| 3600 | on | on | on | on | L'interruttore DIP è impostato sullo stato "3600" e il software di test può modificare liberamente altre suddivisioni. |
| 800 | spento | on | on | on | |
| 1600 | on | spento | on | on | |
| 3200 | spento | spento | on | on | |
| 6400 | on | on | spento | on | |
| 12800 | spento | on | spento | on | |
| 25600 | on | spento | spento | on | |
| 7200 | spento | spento | spento | on | |
| 1000 | on | on | on | spento | |
| 2000 | spento | on | on | spento | |
| 4000 | on | spento | on | spento | |
| 5000 | spento | spento | on | spento | |
| 8000 | on | on | spento | spento | |
| 10000 | spento | on | spento | spento | |
| 20000 | on | spento | spento | spento | |
| 40000 | spento | spento | spento | spento |
Impostazione micro-stepping
I terminali dell'unità sono bruciati?
1. Se si verifica un cortocircuito tra i terminali, verificare se l'avvolgimento del motore è in cortocircuito.
2. Se la resistenza interna tra i terminali è troppo grande, verificare.
3. Se si aggiunge una saldatura eccessiva alla connessione tra i fili per formare una sfera di saldatura.
L'azionamento passo-passo a circuito chiuso ha un allarme?
1. In caso di errore di connessione per il cablaggio dell'encoder, assicurarsi di utilizzare il cavo di prolunga dell'encoder corretto oppure contattare Rtelligent se non è possibile utilizzare un cavo di prolunga per altri motivi.
2. Verificare se l'encoder è danneggiato, ad esempio l'uscita del segnale.
-
 Manuale utente Rtelligent T60PLUS V3.0
Manuale utente Rtelligent T60PLUS V3.0




