




Azionamento passo-passo a circuito chiuso Fieldbus ECT42/ ECT60/ECT86


Introduzione al prodotto



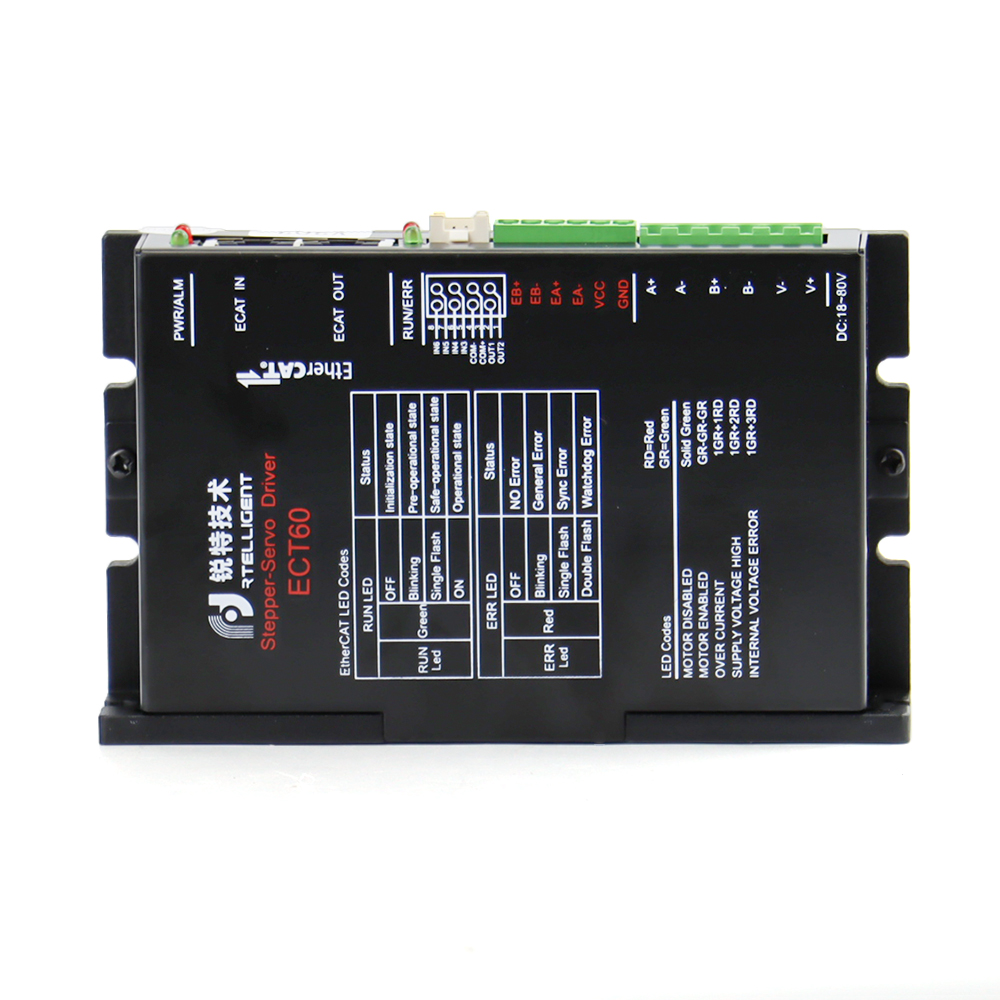
Connessione

Caratteristiche
• Supporta CoE (CANopen su EtherCAT), soddisfa gli standard CiA 402
• Supporta CSP, PP, PV, modalità Homing
• Il periodo minimo di sincronizzazione è 500us
• Connettore RJ45 a doppia porta per comunicazione EtherCAT
• Metodi di controllo: controllo ad anello aperto, controllo ad anello chiuso / controllo FOC (supporto serie ECT)
• Tipo di motore: bifase, trifase;
• Porta IO digitale:
Ingressi di segnale digitale otticamente isolati a 4 canali: IN 1, IN 2 è l'ingresso dell'encoder; IN 3~IN 6 è l'ingresso single-ended da 24 V, metodo di connessione ad anodo comune;
Uscite di segnale digitale otticamente isolate a 2 canali, tensione di tolleranza massima 30 V, corrente massima di versamento o trazione 100 mA, metodo di connessione a catodo comune.
Caratteristiche elettriche
| Modello del prodotto | ECT42 | ECT60 | ECT86 |
| Corrente di uscita (A) | 0,1~2A | 0,5~6A | 0,5~7A |
| Corrente predefinita (mA) | 450 | 3000 | 6000 |
| Tensione di alimentazione | 24~80 V CC | 24~80 V CC | 24~100 V CC / 24~80 V CA |
| Motore abbinato | Sotto la base 42 | Sotto i 60 di base | Sotto la base 86 |
| Interfaccia encoder | Encoder ortogonale incrementale | ||
| Risoluzione dell'encoder | 1000~65535 impulsi/giro | ||
| Ingresso di isolamento ottico | 4 canali di ingresso anodo comune 24V | ||
| Uscita di isolamento ottico | 2 canali: allarme, freno, in posizione e uscita generale | ||
| Interfaccia di comunicazione | Doppio RJ45, con indicazione LED di comunicazione | ||
-
 Manuale utente della serie Rtelligent ECT
Manuale utente della serie Rtelligent ECT



